We often get questions surrounding Spiroid’s ability to ‘backdrive’. While there was a time when we’d respond to such questions with generalizations about reduction ranges and the ‘backdriveability’ of each range, we’ve learned over the years that it is wiser to provide a more complete and nuanced answer. In this post, we’ll try to sprinkle this subject with some context and a little more depth.
For the sake of clarity, let’s clear up a few definitions and misnomers first:
- Backdriving: “A rotation of the input member caused by an external load (dynamic or static torque) being applied to the output.” With Spiroid and Helicon gearing technology the driving member is referred to as the ‘pinion’ while the driven member is referred to as the ‘gear’. Since normal operation involves powering the pinion to drive the gear, a backdriving scenario occurs when the face gear actively drives the pinion.
- Self-Locking: “When the input fails to rotate after an external load applies a dynamic or static torque to the output.” In a self-locking scenario, the Spiroid or Helicon face gear is physically unable to drive the pinion.
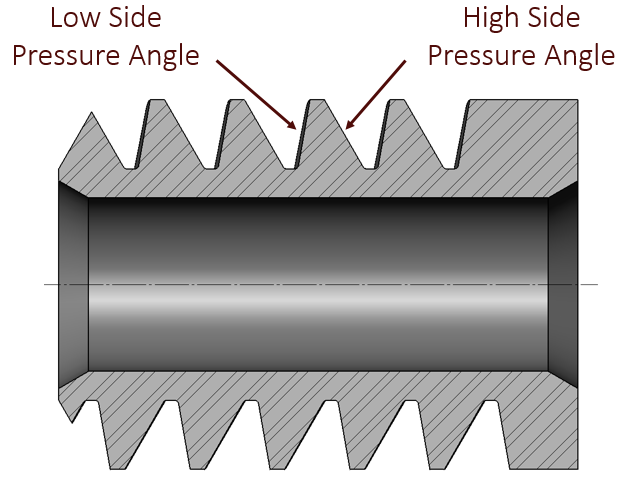
- Bi-Directional Operation: “The ability of the input to drive the output both clockwise and counter-clockwise.” Like most gear types, Spiroid and Helicon are able to operate bi-directionally. Prospective customers often confuse bi-directional operation (input driven) with the ability of a gear set to backdrive (output driven). Note: If an application requires single-direction operation, it is usually recommended that the gearset be designed in such a way that the load is driven by the low-side pressure angle. For clarity on pressure angles, see the image below.
- Stick-Slip: “A spontaneous jerking motion that can occur while two objects are sliding over each other.” In a stick-slip environment, a self-locking gear set gives the impression of being backdriven via small, jerky movements. In reality, this movement is caused by a repeated separation and engagement between the pinion threads and the gear teeth. In effect, the pinion ‘runs away’ until the gear catches up to it in a momentary locked state. There is a fantastic old technical paper on this subject written by S. J. Mikina called “Worm-Drive ‘Jitters’ Can Be Avoided”. If you’re interested, let us know and we’ll forward a copy.
With all of the above in mind it holds true that Spiroid gearing technology is capable of being designed as either ‘backdriveable’ or ‘self-locking’. An important reminder, though: It is usually not advisable to rely exclusively on the self-locking characteristics of the gear set to serve as the system’s only brake. This is particularly true in applications with heavy vibrations which have a tendency to induce the ‘stick-slip’ jitters described above.
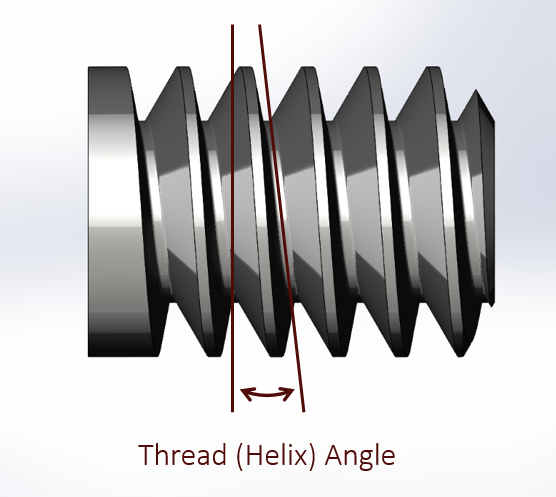
So what are the design parameters of backdriving and self-locking gear sets? When designing with Spiroid gear technology, we first pay close attention to pinion O.D., pinion thread lead, and the resultant pinion thread angle. The image below highlights the pinion’s thread angle. These are the initial indicators of whether or not a particular design will backdrive or self-lock. As a general rule of thumb – and with all else being equal – a thread angle of ≤5º will usually self-lock while a 10º+ thread angle should backdrive. As always, specific application details – i.e. surface finish, lubrication type, and vibration characteristics – will dictate whether or not these general guidelines hold true.
Since these are ‘rules of thumb’ that don’t always hold true, we will generally confirm things by calculating the theoretical backdriving efficiency. This is the final level of review when it comes to understanding whether a particular design will backdrive or self-lock. Typically, any backdriving efficiency less than -10% will be self-locking, while a backdriving efficiency of 10% or greater should backdrive. When backdriving efficiency falls between -10% and +10%, our engineers will alter the design to ensure that backdriving efficiency falls well beyond the preferred side of that range. Or, alternatively, they will insist upon thorough testing to validate.
What does all of this mean for Spiroid’s customers? It means that while it is often true that 15:1 reductions (and less) will backdrive and 25:1 (and greater) will self-lock, these reduction-based guidelines are not always true. If your application hinges on the ability to either backdrive or self-lock it is imperative that we make certain by taking a closer look at the geometry.